Texture Classification
with Biomimetic whisker sensor
About the Project
Rodents can use their whiskers to explore the environment. In addition to obstacle avoidance, the whiskers are able to gather other information about objects such as texture. The whisker itself does not have any sensors, and the sensing components only lie in a follicle at the whisker base. Nonetheless, the whisker can serve as a robust tactile sensor and can be applied in different scenarios.
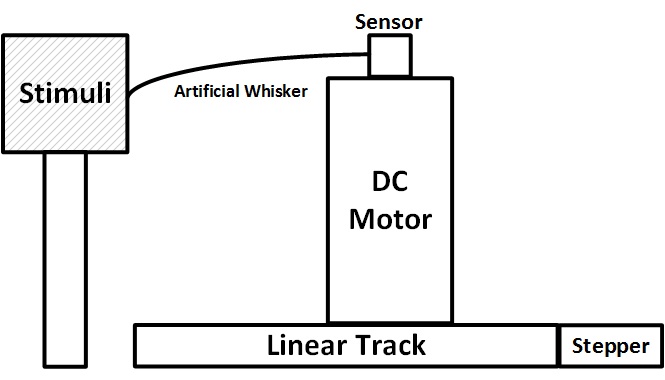
Schematic Diagram of Experiment Setup
Inspired by the natural whisker, a biomimetic mechatronic system with an artificial whisker sensor was developed to simulate rats’ whisking motion and to distinguish different textures. The signal gathered from the whisker sensor was post-processed and analyzed in the frequency domain. Different textures produce unique vibration patterns in the whisker, which can be observed in plots of the power spectral density (PSD). Two classification methods applied to the PSD both achieved over 85% accuracy. By repeating the experiment with different stimuli, a dataset was created to enable future texture classification.
Skills Involved
Mechanical
- Solidworks
- 3D Printing
- Laser cut
- Band Saw (Horizontal & Vertical)
Electrical
- EAGLE
- Protoboard
- Wiring/Soldering
Control
- Python
- C
- Microcontroller (PIC32)
Data Process
- MATLAB
- Digital Signal Processing
- Frequency Analysis
- Github Cooperation
- HDF5
Learn More
The research is under the SeNSE Lab, whose research focuses on neuroscience and bio-inspired robotics.
The research is unpublished yet, but we will present more details on Neuroscience 2019 (October 19-23, Chicago, IL) (Welcome to visit our poster at that time!), and a paper for it hopefully will be published later this year.